Implementation details & customization of algorithms¶
Limbo follows a policy-based design, which allows users to combine high flexibility (almost every part of Limbo can be substituted by a user-defined part) with high performance (the abstraction do not add any overhead, contrary to classic OOP design). These two features are critical for researchers who want to experiment new ideas in Bayesian optimization. This means that changing a part of limbo (e.g. changing the kernel functions) corresponds to changing a template parameter of the optimizer.
For the parameters of the algorithms themselves (e.g. an epsilon), all the classes in Limbo they are given by a template class (usually called Params in our code, and always the first argument). See Parameters for details.
To avoid defining each component of an optimizer manually, Limbo provides sensible defaults. In addition, Limbo relies on Boost.Parameter <http://www.boost.org/doc/libs/1_60_0/libs/parameter/doc/html/index.html> to make it easy to customize a single part. This Boost library allows us to write classes that accept template argument (user-defined custom classes) by name. For instance, to customize the stopping criteria:
using namespace limbo;
// here stop_t is a user-defined list of stopping criteria
bayes_opt::BOptimizer<Params, stopcrit<stop_t>> boptimizer;
Or to define a custom acquisition function:
using namespace limbo;
// here acqui_t is a user-defined acquisition function
bayes_opt::BOptimizer<Params, acquifun<acqui_t>> boptimizer;
Class Structure¶
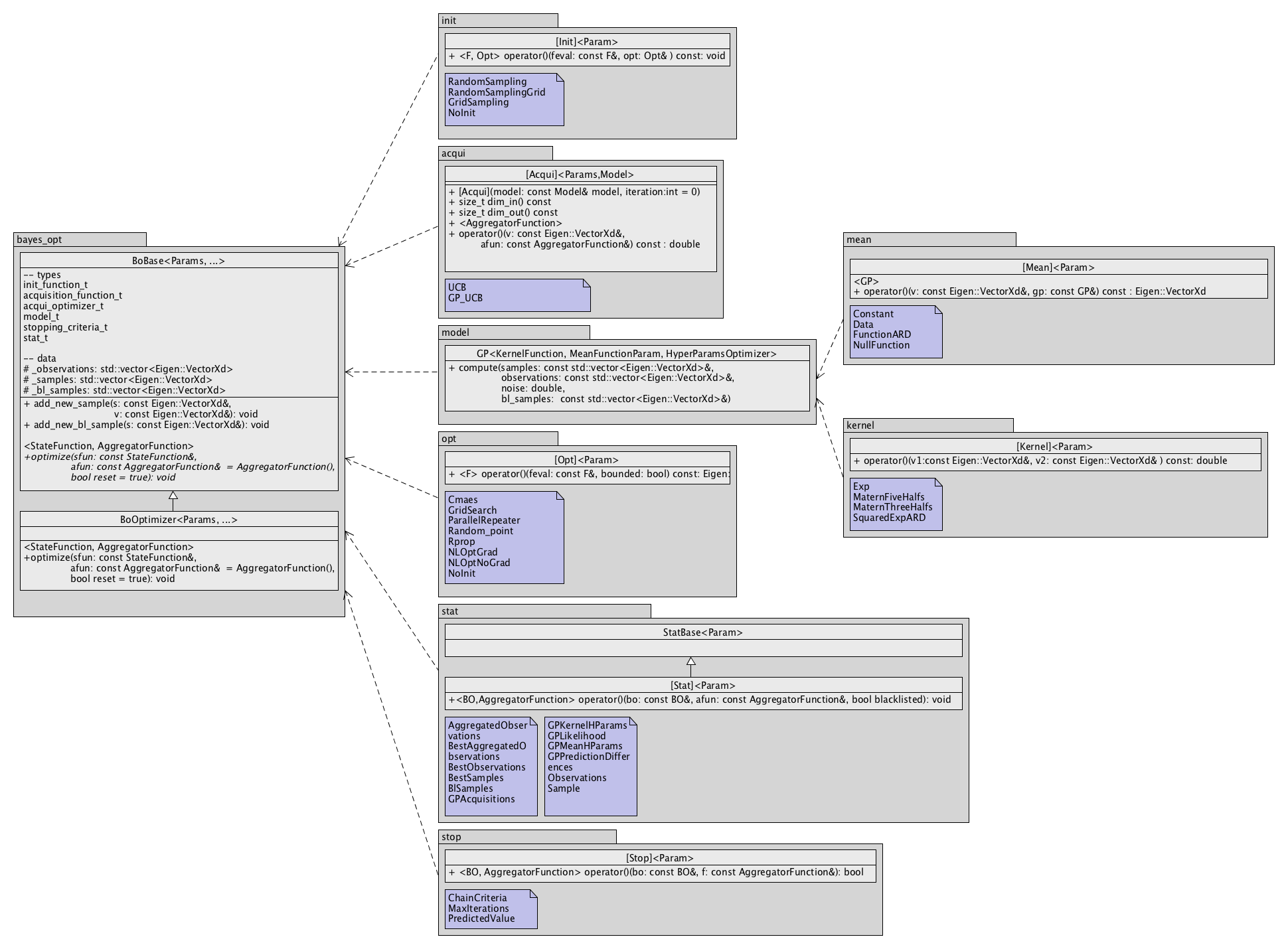
Click on the image to see it bigger.
Sequence graph¶
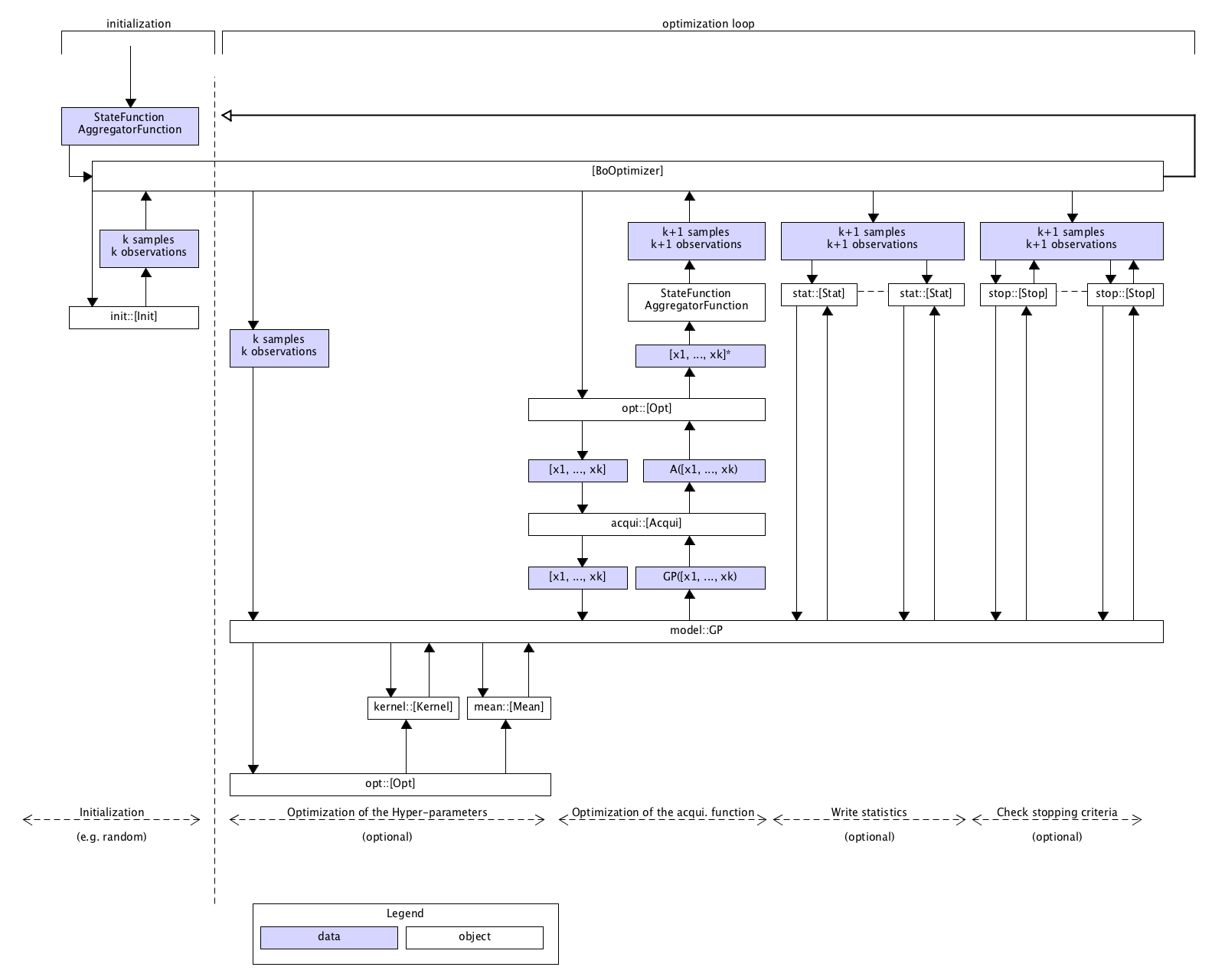
Click on the image to see it bigger.
File Structure¶
(see below for a short explanation of the concepts)
src
+-- limbo:
+-- acqui: acquisition functions
|-- bayes_opt: bayesian optimizers
|-- init: initialization functions
|-- kernel: kernel functions
|-- mean: mean functions
|-- model: models (Gaussian Processes)
|-- opt: optimizers (Rprop, CMA-ES, etc.)
|-- stat: statistics (to dump data)
|-- stop: stopping criteria
|-- tools: useful macros & small functions
|-- tests: unit tests
|-- benchmarks: a few benchmark functions
|-- examples: a few examples
|-- cmaes: [external] the CMA-ES library, used for inner optimizations -- from https://www.lri.fr/~hansen/cmaesintro.html
|-- ehvi: [external] the Expected HyperVolume Improvement, used for Multi-Objective Optimization -- by Iris Hupkens
Each directory in the limbo directory corresponds to a namespace with the same name. There is also a file for each directory called “directory.hpp” (e.g. acqui.hpp) that includes the whole namespace.
Acquisition Functions (acqui::)¶
We can change which Acquisition Function our BOptimizer uses, using the acquifun templated parameter. Every acquisition function takes as template parameters the Params and a Model.
typedef AcquiName<Params, Model> acqui_t;
BOptimizer<Params, acquifun<acqui_t>> boptimizer;
The acquisition functions provided by limbo are the following (see here for more details):
- UCB
Params::ucb::alphashould be available and a float.- Model needs to have the following functions implemented:
int dim_in() const- returns the dimension of input dataint dim_out() const- return the dimension of the output datastd::tuple<Eigen::VectorXd, double> query(const Eigen::VectorXd& v) const- returns mean and sigma at the point v
- GP_UCB
Params::gp_ucb::deltashould be available and a float.- Model needs to have the following functions implemented:
int dim_in() const- returns the dimension of input dataint dim_out() const- return the dimension of the output datastd::tuple<Eigen::VectorXd, double> query(const Eigen::VectorXd& v) const- returns mean and sigma at the point v
Models (model::)¶
We can change which Model our BOptimizer uses, using the modelfun templated parameter. Each model should take as the first template parameter the Params and could optionally have more.
typedef ModelName<Params, ...> model_t;
BOptimizer<Params, modelfun<model_t>> boptimizer;
Each model should have implemented the following functions:
- Should have constructor of the form:
ModelName(int dim_in, int dim_out)
void compute(const std::vector<Eigen::VectorXd>& samples, const std::vector<Eigen::VectorXd>& observations, double noise, const std::vector<Eigen::VectorXd>& bl_samples)
limbo provides only a Gaussian Process model for now. See gaussian process section of the BO guide for more details.
Kernel Functions in GP model (kernel::)¶
We can change which Kernel Function our GP uses, using the second template parameter of the GP class. Every kernel function takes as template parameters the Params and optionally some more.
typedef KernelName<Params> kernel_t;
typedef GP<Params, kernel_t, ...> gp_t;
BOptimizer<Params, modelfun<gp_t>> boptimizer;
The kernel functions provided by limbo are the following (see kernel function section of the BO guide for more details):
- Exp
Params::kf_exp::sigmashould be available and a float.
- MaternFiveHalfs
Params::kf_maternfivehalfs::sigmashould be available and a float.Params::kf_maternfivehalfs::lshould be available and a float.
- MaternThreeHalfs
Params::kf_maternthreehalfs::sigmashould be available and a float.Params::kf_maternthreehalfs::lshould be available and a float.
- SquaredExpARD
- No params needed
- Used for kernel’s hyperparameters optimization
Mean Functions in GP model (mean::)¶
We can change which Mean Function our GP uses, using the third template parameter of the GP class. Every mean function takes as template parameters the Params and optionally some more.
typedef MeanName<Params> mean_t;
typedef GP<Params, ..., mean_t, ...> gp_t;
BOptimizer<Params, modelfun<gp_t>> boptimizer;
The mean functions provided by limbo are the following (see the mean function section of the BO guide for more details):
- NullFunction
- No params needed
- Zero mean
- Constant
Params::meanconstant::constantshould be available and aEigen::VectorXdwith size same asGP::dim_out.- Constant mean
- Data
- GP needs to have the following functions implemented:
Eigen::VectorXd mean_observation()- returns the mean observation
Mean of actual data
- FunctionARD
- No params needed
- Used for mean’s hyperparameters optimization
- It takes as a template parameter the mean function to use
Optimizers (opt::)¶
Statistics (stat::)¶
We can change which Statistics our BOptimizer outputs, using the statfun templated parameter. Every statistic takes as template parameters the Params and optionally some more. All statistics should inherit from StatBase class.
typedef StatName<Params> stat_t;
BOptimizer<Params, statfun<stat_t>> boptimizer;
limbo provides only Acquisitions statistics for now.